
Faculty Members Introduction

Daisuke Yamamoto
Full professor
| Laboratory | Autonomous Mobile Robotics Laboratory |
|---|---|
| Main research interests | Outdoor mobile robots, Locomotion over rough terrain, Multi-robot coordination |
| Research overview | Robots capable of navigating indoor environments, such as cleaning robots and service robots in homes and restaurants, are becoming increasingly widespread. These robots recognize their surroundings using sensors such as cameras, calculate optimal paths based on pre-installed maps, and control actuators like motors to move accordingly. In this laboratory, we focus on the research and development of autonomous robots that can move freely not only indoors but also outdoors or in map-less environments, navigating rough or unstructured terrains using their own perception and decision-making capabilities. |
| Instructing Courses | Mechanical Dynamics A & B, Kinematics of Mechanisms, Machine Design Drafting and Digital Technical Product Documentation / DTPD D, Basic Course for Technologists A & B, Project-Based Practical Design and Manufacturing C, Introduction to Research and Development, Seminar A & B, Graduation Thesis |
-
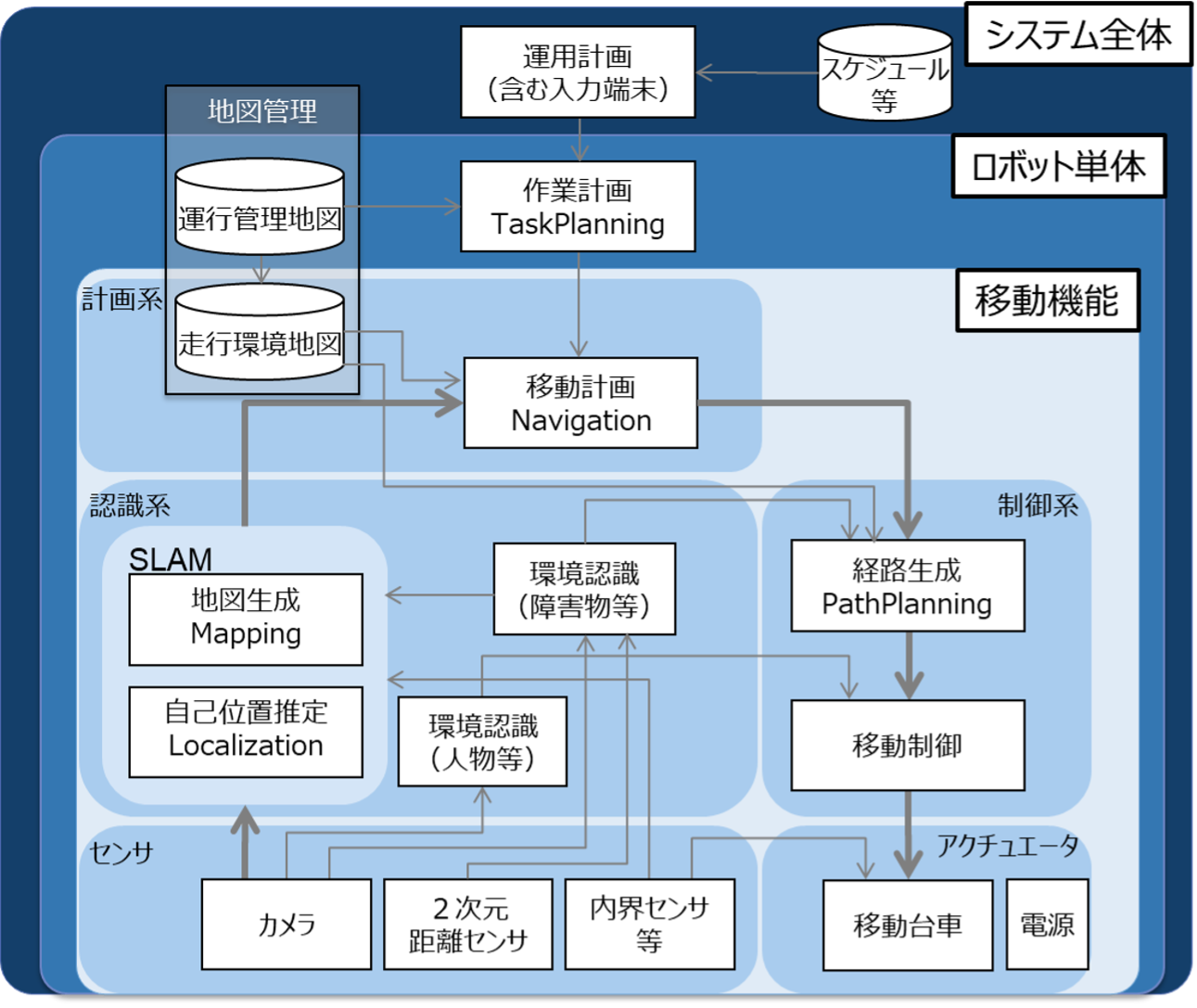
Configuration of Mobile Robot Systems -